Numerical integration: Composite quadrature rules#
As usual, we import the necessary modules before we get started.
%matplotlib inline
import numpy as np
from numpy import pi
from math import sqrt
from numpy.linalg import solve, norm # Solve linear systems and compute norms
import matplotlib.pyplot as plt
import matplotlib.cm as cm
#import ipywidgets as widgets
#from ipywidgets import interact, fixed
newparams = {'figure.figsize': (16.0, 8.0),
'axes.grid': True,
'lines.markersize': 8,
'lines.linewidth': 2,
'font.size': 14}
plt.rcParams.update(newparams)
#plt.xkcd()
General construction of quadrature rules#
In the following, you will learn the steps on how to construct realistic algorithms for numerical integration, similar to those used in software like Matlab of SciPy. The steps are:
Construction.
Choose \(n+1\) distinct nodes on a standard interval \(I\), often chosen to be \(I=[-1,1]\).
Let \(p_n(x)\) be the polynomial interpolating some general function \(f\) in the nodes, and let the \(Q[f](-1,1)=I[p_n](-1,1)\).
Transfer the formula \(Q\) from \([-1,1]\) to some interval \([a,b]\).
Design a composite formula, by dividing the interval \([a,b]\) into subintervals and applying the quadrature formula on each subinterval.
Find an expression for the error \(E[f](a,b) = I[f](a,b)-Q[f](a,b)\).
Find an expression for an estimate of the error, and use this to create an adaptive algorithm.
Constructing quadrature rules on a single interval#
We have already seen in the previous Lecture how quadrature rules on a given interval \([a,b]\) can be constructed using polynomial interpolation.
For \(n+1\) quadrature points \(\{x_i\}_{i=0}^n \subset [a,b]\), we compute weights by
where \(\ell_i(x)\) are the cardinal functions associated with \(\{x_i\}_{i=0}^n\) satisfying \(\ell_i(x_j) = \delta_{ij}\) for \(i,j = 0,1,\ldots, n\). The resulting quadrature rule has (at least) degree of exactness equal to \(n\).
But how to you proceed if you know want to compute an integral on a different interval, say \([c,d]\)? Do we have to reconstruct all the cardinal functions and recompute the weights?
The answer is NO! One can easily transfer quadrature points and weights from one interval to another. One typically choose the simple reference interval \(\widehat{I} = [-1, 1]\). Then you determine some \(n+1\) quadrature points \(\{\widehat{x}_i\}_{i=0}^n \subset [-1,1]\) and quadrature weights \(\{\widehat{w}_i\}_{i=0}^n\) to define a quadrature rule \(Q(\widehat{I})\)
The quadrature points can then be transferred to an arbitrary interval \([a,b]\) to define a quadrature rule \(Q(a,b)\) using the transformation
and thus we define \(\{x_i\}_{i=0}^n\) and \(\{w_i\}_{i=0}^n\) by
Example: Simpson’s rule
Choose standard interval \([-1,1]\). For Simpson’s rule, choose the nodes \(x_0=-1\), \(x_1=0\) and \(x_2=1\). The corresponding cardinal functions are
\(\displaystyle \ell_0 = \frac{1}{2}(x^2-x), \qquad \ell_1(x) = 1-x^2, \qquad \ell_2(x) = \frac{1}{2}(x^2+x). \)
which gives the weights
\(\displaystyle w_0 = \int_{-1}^1 \ell_0(x)dx = \frac{1}{3}, \qquad w_1 = \int_{-1}^1 \ell_1(x)dx = \frac{4}{3}, \qquad w_2 = \int_{-1}^1 \ell_2(x)dx = \frac{1}{3}\)
such that
\( \displaystyle \int_{-1}^1 f(t) dx \approx \int_{-1}^1 p_2(x) dx = \sum_{i=0}^2 w_i f(x_i) = \frac{1}{3} \left[\; f(-1) + 4 f(0) + f(1) \; \right].\)
After transferring the nodes and weights, Simpson’s rule over the interval \([a,b]\) becomes
\(\displaystyle S(a,b) = \frac{b-a}{6}\left[\; f(a)+4f(c)+f(b)\; \right], \qquad c=\frac{b+a}{2}\).
Composite quadrature rules#
To generate more accurate quadrature rule \(Q(a,b)\) we have in principle two possibilities:
Increase the order of the interpolation polynomial used to construct the quadrature rule.
Subdivide the interval \([a,b]\) into smaller subintervals and apply a quadrature rule on each of the subintervals, leading to Composite Quadrature Rules which we will consider next.
colors = plt.get_cmap("Pastel1").colors
def plot_cqr_examples(m):
f = lambda x : np.exp(x)
fig, axs = plt.subplots(1,2)
fig.set_figheight(4)
fig.set_figwidth(fig.get_size_inches()[0]*1)
#axs[0].add_axes([0.1, 0.2, 0.8, 0.7])
a, b = -0.5,0.5
l, r = -1.0, 1.0
x_a = np.linspace(a, b, 100)
for ax in axs:
ax.set_xlim(l, r)
x = np.linspace(l, r, 100)
ax.plot(x, f(x), "k--", label="$f(x)$")
#ax.fill_between(x_a, f(x_a), alpha=0.1, color='k')
ax.xaxis.set_ticks_position('bottom')
ax.set_xticks([a,b])
ax.set_xticklabels(["$a$", "$b$"])
ax.set_yticks([])
ax.legend(loc="upper center")
h = (b-a)/m
# Compute center points for each interval
xcs = np.linspace(a+h/2, b-h/2, m)
xis = np.linspace(a,b,m+1)
# Midpoint rule
axs[0].bar(xis[:-1], f(xcs), h, align='edge', color=colors[2], edgecolor="black")
axs[0].plot(xcs,f(xcs), 'ko', markersize=f"{6*(m+1)/m}")
axs[0].set_title("Composite midpoint rule")
# Trapezoidal rule
axs[1].set_title("Composite trapezoidal rule")
axs[1].fill_between(xis, f(xis), alpha=0.8, color=colors[4])
axs[1].plot(xis,f(xis), 'ko', markersize=f"{6*(m+1)/m}")
plt.vlines(xis, 0, f(xis), colors="k")
plt.show()
import ipywidgets as widgets
from ipywidgets import interact
slider = widgets.IntSlider(min = 1,
max = 20,
step = 1,
description="Number of subintervals m",
value = 1)
interact(plot_cqr_examples, m=slider)
<function __main__.plot_cqr_examples(m)>
m = 4
plot_cqr_examples(m)
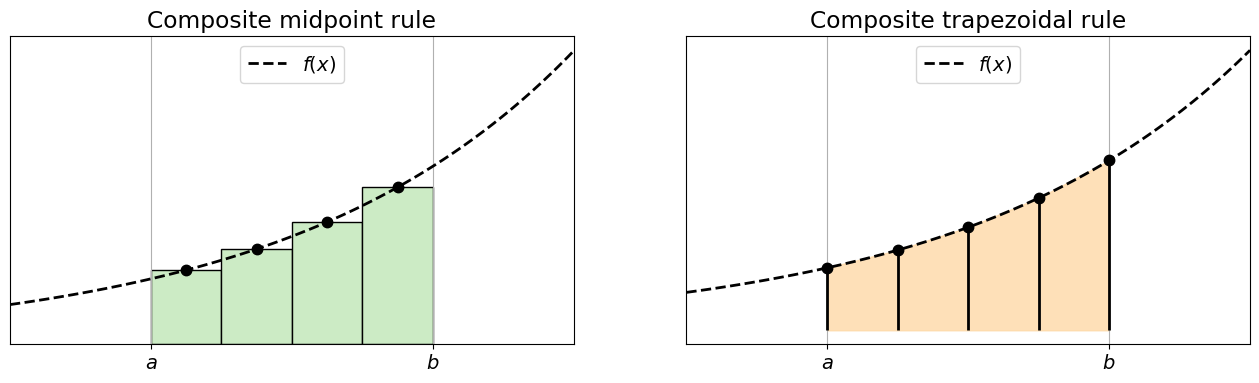
Select \(m \geqslant 1\) and divide \([a,b]\) into \(m\) equally spaced subintervals \([x_{i-1}, x_{i}]\) defined by \(x_i = a + i h\) with \(h = (b-a)/m\) for \(i=1,\ldots, m\). Then for a given quadrature rule \(\mathrm{Q}[\cdot](x_{i-1},x_i)\) the corresponding composite quadrature rule \(\mathrm{CQ}[\cdot]({[x_{i-1}, x_{i}]}_{i=1}^{m})\) is given by
Composite trapezoidal rule#
Using the trapezoidal rule
the resulting composite trapezoidal rule is given by
Exercise 9 (Testing the accuracy of the composite trapezoidal rule)
Have a look at the CT function which implements the composite trapezoidal rule:
def CT(f, a, b, m):
""" Computes an approximation of the integral f
using the composite trapezoidal rule.
Input:
f: integrand
a: left interval endpoint
b: right interval endpoint
m: number of subintervals
"""
x = np.linspace(a,b,m+1)
h = float(b - a)/m
fx = f(x[1:-1])
ct = h*(np.sum(fx) + 0.5*(f(x[0]) + f(x[-1])))
return ct
Use this function to compute an approximate value of integral
for \(m = 4, 8, 16, 32, 64\) corresponding to \( h = 2^{-2}, 2^{-3}, 2^{-4}, 2^{-5}, 2^{-6}\). Tabulate the corresponding quadrature errors \(I(0,1) - Q(0,1)\). What do you observe?
# Insert your code here
def f(x):
return np.cos(np.pi/2*x)
a, b = 0, 1
m = 2
int_f = 2/np.pi
qr_f = CT(f, a, b, m)
print(f"Exact value {int_f}")
print(f"Numerical integration for m = {m} gives {qr_f}")
print(f"Difference = {int_f - qr_f}")
for m in [4, 8, 16, 32, 64]:
qr_f = CT(f, a, b, m)
print(f"Exact value {int_f}")
print(f"Numerical integration for m = {m} gives {qr_f}")
print(f"Difference = {int_f - qr_f}")
Exact value 0.6366197723675814
Numerical integration for m = 2 gives 0.6035533905932737
Difference = 0.03306638177430765
Exact value 0.6366197723675814
Numerical integration for m = 4 gives 0.6284174365157311
Difference = 0.008202335851850262
Exact value 0.6366197723675814
Numerical integration for m = 8 gives 0.6345731492255537
Difference = 0.002046623142027637
Exact value 0.6366197723675814
Numerical integration for m = 16 gives 0.6361083632808496
Difference = 0.0005114090867317511
Exact value 0.6366197723675814
Numerical integration for m = 32 gives 0.6364919355013015
Difference = 0.00012783686627992896
Exact value 0.6366197723675814
Numerical integration for m = 64 gives 0.636587814113642
Difference = 3.195825393942364e-05
Solution to Exercise 9 (Testing the accuracy of the composite trapezoidal rule)
# Define function
def f(x):
return np.cos(pi*x/2)
# Exact integral
int_f = 2/pi
# Interval
a, b = 0, 1
# Compute integral numerically
for m in [4, 8, 16, 32, 64]:
cqr_f = CT(f, a, b, m)
print(f"I[f] = {int_f}")
print(f"Q[f, {a}, {b}, {m}] = {qr_f}")
print(f"I[f] - Q[f] = {int_f - qr_f:.3e}")
Remark 3
We observe that for each doubling of the number of subintervals we decrease the error by a fourth. That means that if we look at the quadrature error \(I[f]-\mathrm{CT}[f]\) as a function of the number of subintervals \(m\) (or equivalently as a function of \(h\)), then \(|I[f]-\mathrm{CT}[f]| \approx \tfrac{C}{m^2} = C h^2\).
Error estimate for the composite trapezoidal rule#
We will now theoretically explain the experimentally observed convergence rate in the previous Exercise 9.
First we have to recall the error estimate for for the trapezoidal rule on a single interval \([a,b]\). If \(f\in C^2(a,b)\), then there is a \(\xi \in (a,b)\) such that
Theorem 7 (Quadrature error estimate for composite trapezoidal rule)
Let \(f\in C^2(a,b)\), then the quadrature error \(I[f]-\mathrm{CT}[f]\) for the composite trapezoidal rule can be estimated by
where \(M_2 = \max_{\xi\in[a,b]} |f''(\xi)|\).
Proof.
Interlude: Convergence of \(h\)-dependent approximations#
Let \(X\) be the exact solution, and \(X(h)\) some numerical solution depending on a parameter \(h\), and let \(e(h)\) be the norm of the error, so \(e(h)=\|X-X(h)\|\). The numerical approximation \(X(h)\) converges to \(X\) if \(e(h) \rightarrow 0\) as \(h\rightarrow 0\). The order of the approximation is \(p\) if there exists a positive constant \(M\) such that
This is often expresed using the Big \(\mathcal{O}\)-notation,
Again, we see that a higher approximation order \(p\) leads for small values of \(h\) to a better approximation of the solution. Thus we are generally interested in approximations of higher order.
Numerical verification
The following is based on the assumption that \(e(h)\approx C h^p\) for some unknown constant \(C\). This assumption is often reasonable for sufficiently small \(h\).
Choose a test problem for which the exact solution is known and compute the error for a decreasing sequence of \(h_k\)’s, for instance \(h_k=H/2^k\), \(k=0,1,2,\dots\). The procedure is then quite similar to what was done for iterative processes.
For one refinement step where one passes from \(h_k \to h_{k+1}\), the number
Since
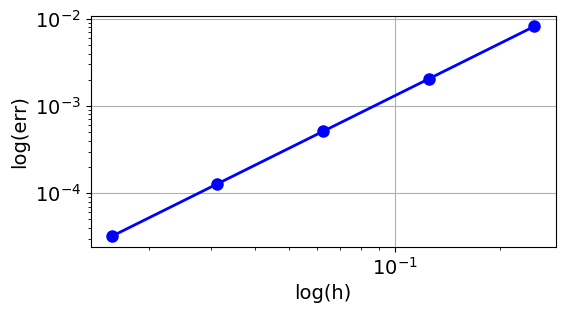
Exercise 10 (Convergence order of composite trapezoidal rule)
Examine the convergence order of composite trapezoidal rule.
# Insert your code here.
Solution to Exercise 10 (Convergence order of composite trapezoidal rule)
# Define function
def f(x):
return np.cos(pi*x/2)
# Exact integral
int_f = 2/pi
# Interval
a, b = 0, 1
errs = []
hs = []
# Compute integral numerically
for m in [4, 8, 16, 32, 64]:
cqr_f = CT(f, a, b, m)
print("Number of subintervals m = {}".format(m))
print("Q[f] = {}".format(cqr_f))
err = int_f - cqr_f
errs.append(err)
hs.append((b-a)/m)
print("I[f] - Q[f] = {:.10e}".format(err))
hs = np.array(hs)
errs = np.array(errs)
eocs = np.log(errs[1:]/errs[:-1])/np.log(hs[1:]/hs[:-1])
print(eocs)
plt.figure(figsize=(6, 3))
plt.loglog(hs, errs, "bo-")
plt.xlabel("log(h)")
plt.ylabel("log(err)")
# Adding infinity in first row to eoc list
# to make it the same length as errs
eocs = np.insert(eocs, 0, np.inf)
Number of subintervals m = 4
Q[f] = 0.6284174365157311
I[f] - Q[f] = 8.2023358519e-03
Number of subintervals m = 8
Q[f] = 0.6345731492255537
I[f] - Q[f] = 2.0466231420e-03
Number of subintervals m = 16
Q[f] = 0.6361083632808496
I[f] - Q[f] = 5.1140908673e-04
Number of subintervals m = 32
Q[f] = 0.6364919355013015
I[f] - Q[f] = 1.2783686628e-04
Number of subintervals m = 64
Q[f] = 0.636587814113642
I[f] - Q[f] = 3.1958253939e-05
[2.00278934 2.00069577 2.00017385 2.00004346]
# Do a pretty print of the tables using panda
import pandas as pd
#from IPython.display import display
table = pd.DataFrame({'Error': errs, 'EOC' : eocs})
display(table)
print(table)
| Error | EOC | |
|---|---|---|
| 0 | 0.008202 | inf |
| 1 | 0.002047 | 2.002789 |
| 2 | 0.000511 | 2.000696 |
| 3 | 0.000128 | 2.000174 |
| 4 | 0.000032 | 2.000043 |
Error EOC
0 0.008202 inf
1 0.002047 2.002789
2 0.000511 2.000696
3 0.000128 2.000174
4 0.000032 2.000043
Exercise 11 (Composite Simpson’s rule)
The composite Simpson’s rule is considered in detail in homework assignment 2.
Theorem 8 (Quadrature error estimate for composite Simpon’s rule)
Let \(f\in C^4(a,b)\), then the quadrature error \(I[f]-\mathrm{CT}[f]\) for the composite trapezoidal rule can be estimated by
where \(M_4 = \max_{\xi\in[a,b]} |f^{(4)}(\xi)|\).
Proof.
Will be part of homework assignment 2.